国内领先的智慧场景应用与智能终端解决方案供应商

智能机器人
户外轮式巡检机器人
高越障
High Obstacle Crossing高稳定
High Stability自导航
Self navigation

Outdoor Wheeled Inspection Robot
户外轮式巡检机器人
搭载高性能红外+可见光双路视频摄像仪和无线通讯系统。环境运行双维监测、参数自主识别读取、故障风险预警报告,场景功能需求全覆盖,运行自主智能全天候。
行业痛点
巡检距离长,天气状况复杂,工作负荷高
人工经验依赖度高,实时数据缺乏,疏漏错检风险大
动态环境感知不敏锐,故障预警难把握
人工纸质化依赖度高,数据信息无溯源,趋势分析预判无体系

无人值守巡检系统
总览概括
异常告警
环境记录
巡检记录
巡检管理
运动控制
系统设置
大屏展示
系统功能
智能巡检功能 | 巡检机器人监控功能
热成像测温 | 图像采集、图像识别
应急语音对讲 | 自动充电
安全防护 | 安全避障
局防跌落保护 | 紧急制动
遥控手柄
热成像测温 | 图像采集、图像识别
应急语音对讲 | 自动充电
安全防护 | 安全避障
局防跌落保护 | 紧急制动
遥控手柄

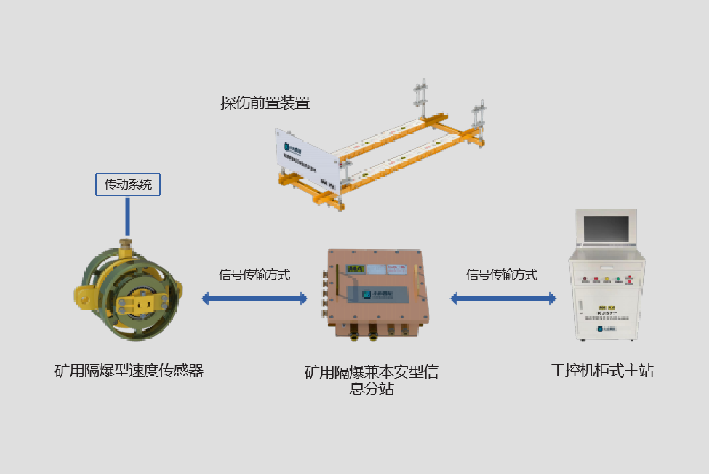
巡检机器人的配置为机器人本体、充电桩/充电房、无线通信基站、无人巡检系统、及其他辅助设施。
巡检机器人的配置为机器人本体、无人巡检系统、充电桩及其他辅助设施。所有部件均能够承受贮存、运输和巡检条件下所规定的各种环境条件,并满足现行的国家标准、行业标准。
室外轮式巡检机器人是一款融合了先进机械设计、人工智能、传感器技术以及无线通信的高科技智能装备,专为应对户外复杂且多样化的巡检需求而打造,应用与电力行业、石油化工行业、工业园区等,它能够替代人工,对工业设施、能源站点、公共场所等进行全方位、高精度、不间断的巡检工作,大幅提升巡检效率与质量,保障设施的安全稳定运行,为现代化运维管理注入强大动力。
人性化设计 更多功能保障

激光 SLAM 导航
机器人通过自身所携带的内、外部传感器来对自身进行定位,并在定位的基础上利用外部传感器获取的环境信息增量式的构建环境地图。

高越障多环境适应
采用四驱方式驱动,具备强大的爬坡越障能力。坡道可适应水泥、沥青等硬地面。

全向云台 360°覆盖
搭载 360°水平旋转,-90°至 90 俯仰运动的双仓云台,结合高精度定位和位置反馈技术,实现了现场无限预置位的能力。

智能巡检联动一体
固定式+环境巡检,复合多系统,区域内全覆盖无死角监测,智能信息监测记录,异常模块锁定预警。

安全避障
载避障传感器实现准确、及时避障,在行走过程中如遇障碍物应及时停止,具备防碰撞功能

模块化配置
固件可升级,并可按客户需求定制